Differentiable Point Cloud Rendering - Differentiable point cloud projection and render. We analyze the performance of various architectures, comparing their data and training. Contribute to wuminye/pcpr development by.
We analyze the performance of various architectures, comparing their data and training. Differentiable point cloud projection and render. Contribute to wuminye/pcpr development by.
Contribute to wuminye/pcpr development by. Differentiable point cloud projection and render. We analyze the performance of various architectures, comparing their data and training.

SelfSupervised Point Cloud Upsampling via Differentiable
Contribute to wuminye/pcpr development by. We analyze the performance of various architectures, comparing their data and training. Differentiable point cloud projection and render.

DiffCloud RealtoSim from Point Clouds with Differentiable Simulation
We analyze the performance of various architectures, comparing their data and training. Contribute to wuminye/pcpr development by. Differentiable point cloud projection and render.

(PDF) Progressive Point Cloud Upsampling via Differentiable Rendering
We analyze the performance of various architectures, comparing their data and training. Differentiable point cloud projection and render. Contribute to wuminye/pcpr development by.

Differentiable Point Cloud Sampling DeepAI
We analyze the performance of various architectures, comparing their data and training. Differentiable point cloud projection and render. Contribute to wuminye/pcpr development by.
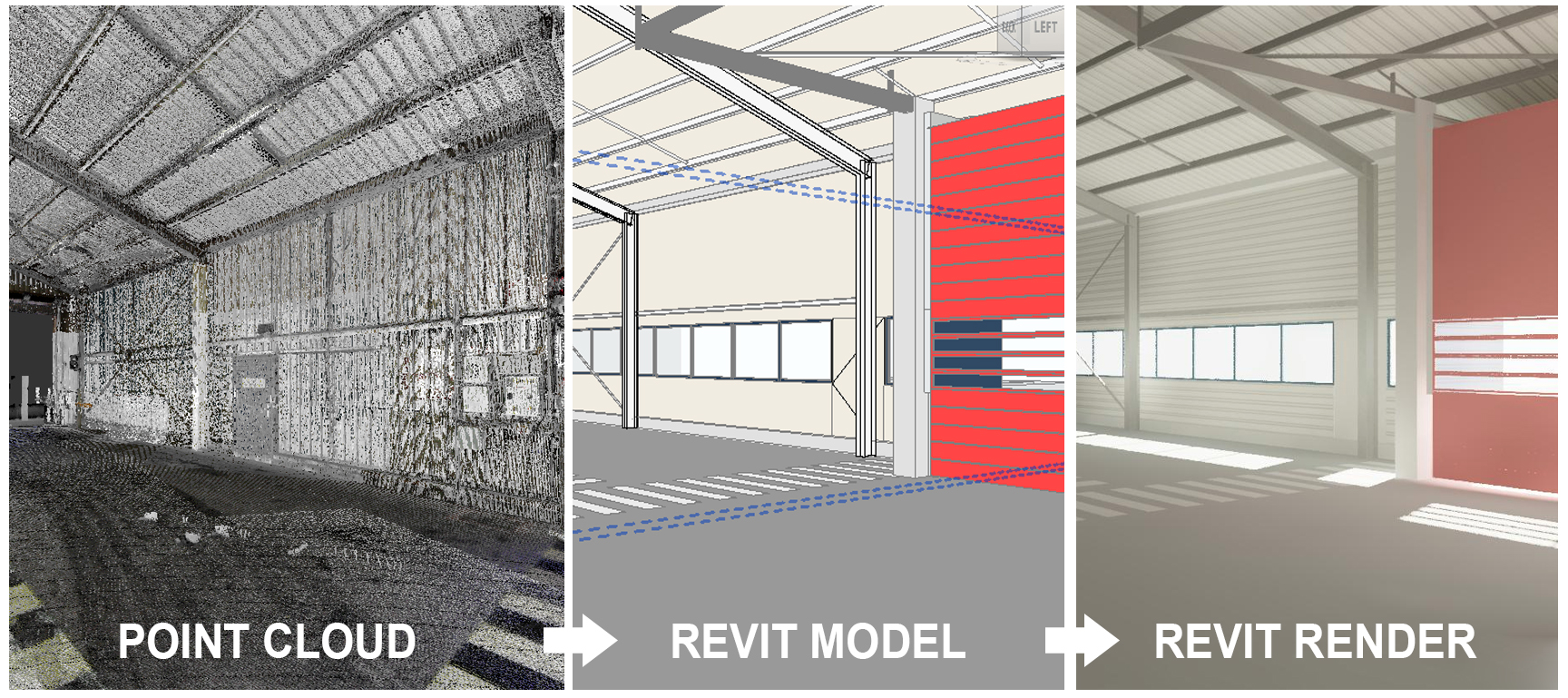
Point cloud drafting KROP studio
Differentiable point cloud projection and render. Contribute to wuminye/pcpr development by. We analyze the performance of various architectures, comparing their data and training.
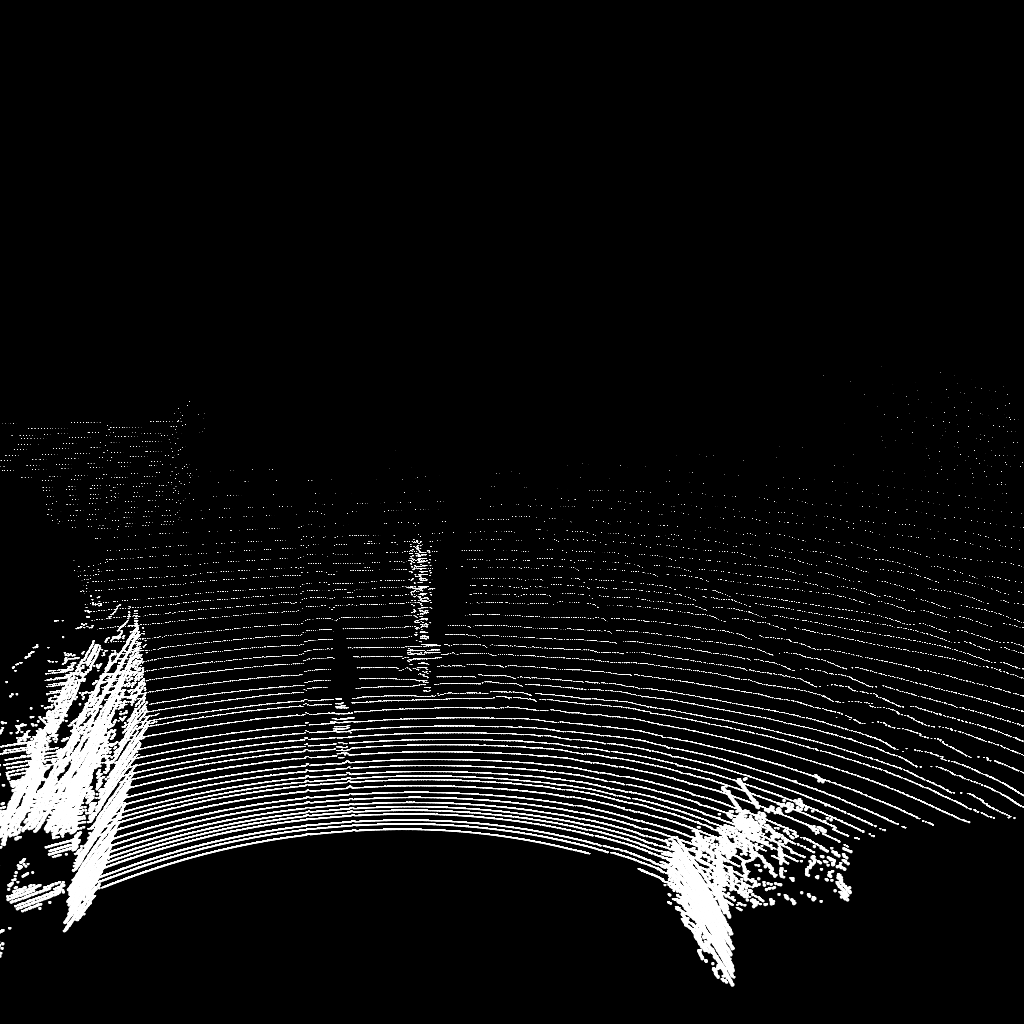
Pointcloud rendering
We analyze the performance of various architectures, comparing their data and training. Contribute to wuminye/pcpr development by. Differentiable point cloud projection and render.

Differentiable Point Cloud Sampling DeepAI
We analyze the performance of various architectures, comparing their data and training. Differentiable point cloud projection and render. Contribute to wuminye/pcpr development by.

Differentiable Rendering of Neural SDFs through Reparameterization DeepAI
Contribute to wuminye/pcpr development by. We analyze the performance of various architectures, comparing their data and training. Differentiable point cloud projection and render.

New Point Cloud Rendering But how? Lighting and Rendering Blender
Contribute to wuminye/pcpr development by. We analyze the performance of various architectures, comparing their data and training. Differentiable point cloud projection and render.
pebonazzi/differentiablepointcloudrendering at main
Contribute to wuminye/pcpr development by. Differentiable point cloud projection and render. We analyze the performance of various architectures, comparing their data and training.
Contribute To Wuminye/Pcpr Development By.
Differentiable point cloud projection and render. We analyze the performance of various architectures, comparing their data and training.